PENGANTAR PENGENDALIAN PROSES
1.1. PENDAHULUAN
Ketika kita melakukan pengamatan pada proses kimia di pabrik atau
laboratorium, maka terdapat banyak aliran dari vessel ke vessel, gelembung cairan dan material viscous serta semua alat berubah secara terus menerus. Dengan perubahan sedikit saja maka bisa terdapat respon yang berakibat fatal. Kesimpulan dari wacana sementara ini adalah bahwa dunia adalah sebuah dinamika dan ini merupakan alasan yang tepat untuk adanya sebuah proses kontrol. Dalam memahami perilaku sistem maka seorang engineer process design dapat memahami prilaku dinamiknya.
Teknik pengontrolan adalah ilmu teknik yang digunakan pada banyak aplikasi misalnya kimia, listrik dan teknik mesin serta diterapkan pada berbagai sistem fisik mulai dari sirkuit elektrik sampai pada perancangan robot. Dalam bidang ilmu teknik kimia proses kontrol diterapkan pada disain reaktor, Heat exchanger, dan peralatan transfer massa lainnya.
Proses kontrol adalah topik esensial bagi seorang chemical engineers misalnya pada perancangan pabrik yang harus mempertimbangkan prilaku dinamik pada semua peralatan karena pabrik tidak beroperasi secara steady state.
Engineers yang bertanggung jawab pada beroperasinya pabrik harus
memastika bahwa respon yang terjadi akibat adanya gangguan harus bsa diatasi agar tetap aman dan menguntungkan.
Kesimpulannya tugas seorang engineers untuk mendisain, membangun dan
mengoperasikan sistem fisik adalah sebuah aktivitas untuk menjaga sistem pada kondisi yang diinginkan.
Teknik proses kontrol meliputi analisis matematika dan praktek teknik,
sebelum kita memahami tujuan dari prinsip proses kontrol dan perhitungannya maka kita harus mengetahui tujuan dari proses kontrol dan hubungannya dengan teknik kimia. Bab ini akan membahas mengenai pertanyaan- pertanyaan sebagai berikut :
Ø Apa saja yang dilakukan proses kontrol?
Ø Mengapa diperlukan proses kontrol?
Ø Mengapa dimngkinkan adanya proses kontrol?
Ø Bagaimana proses kontrol dilakukan?
Ø Dimana sistem kontrol diterapkan?
Ø Apa saja yang dilakukan control engineer?
Ø Bagaimana proses kontrol didokumentasikan?
Ø Apa saja contoh dari sistem kontrol yang strategis?
1.2. Apa saja yang dilakukan oleh proses kontrol ?

Pertama tama kita akan mendiskusikan mengenai 2 contoh dari sistem kontrol yang terdapat dalam kehidupan kita sehari-hari kemudian kita akan mendiskusikan mengenai sistem yang lebih umum dalam defenisi sistem kontrol dan feedback kontrol.
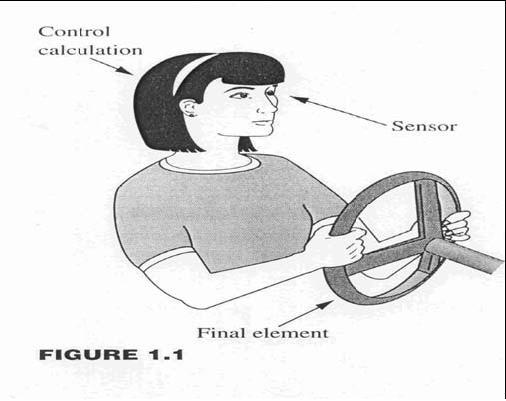
Contoh pertama adalah orang yang mengendarai mobil seperti yang ditunjukan oleh Gambar 1.1. Supir harus memiliki tujuan atau objektif. Pertama tama supir harus menentukan lokasi dari mobil di jalan dengan menggunkan mata untuk melihat posisi mobil di jalan kemudian supir juga harus memperhitungkan keaadan agar menjaga mobil tetap pada posisi yang diinginkan di jalan dan akhirnya supir haruslah mengubah posisi mobil dengan menggunakan stir. Dengan mengunakan ketiga cara ini maka supir bisa menjaga mobil tetap berada pada posisi ynang diinginkan.
Contoh kedua adalah sistem pemanas sederhana seperti yang ditunjukan
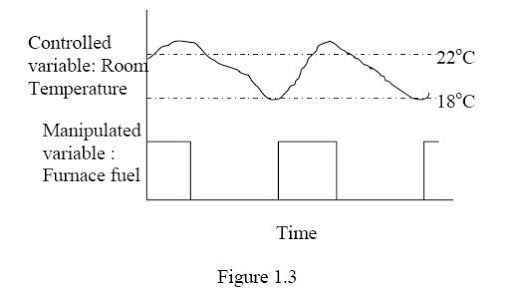
gambar 1.2. Rumah yang berada pada daerah beriklim dingin bisa menaikan suhu dengan menggunakan pemanas. Temperatur dalam ruangan diukur oleh termostat yang kemudian membandingkannya dengan temperatur ruang pada range yang diinginkan, katakanlah 18 sampai 22oC. Jika temperature dibawah 18oC, furnace dan pompa akan menyala, dan jika temperature di atas 22oC, furnace dan pompa akan berhenti bekerja. Jika temperature diantara 18 sampai 22oC,kondisi furnace dan pompa tidak akan berubah. Secara umum prilaku dari kondisi temperature dalam rumah diberikan dalam figure 1.3, yang menunjukkan bagaimana temperature
bergeser secara perlahan dari batas atas dan bawah. Dapat dilihat juga bahwa ada suatu saat prilaku temperature melewati batas-batas tersebut, karena furnace dan heat exchanger tidak memberikan respons secepatnya. Pendekatan ini dinamakan “on/off”control dan dapat digunakan sewaktu control yang akurat pada nilai yang diinginkan tidak diperlukan. Kita akan membahas metode pengontrolan yang lebih baik di bagian berikutnya, dimana dapat mempertahankan variable yang penting cukup dekat pada nilai yang diinginkan.
Setelah tadi kita membahas secara sekilas mengenai dua sistem control,
kemudian kita akan mengidentifikasikan beberapa fitur umum. Yang pertama adalah tiap sistem menggunakan nilai yang spesifik (atau range) sebagai nilai yang diinginkan sebagai variable yang dikontrol. Sewaktu kita membahas kalkulasi control dalam Bagian III, kita akan menggunakan istilah set point untuk nilai yang diinginkan. Yang kedua, Kondisi dari sistem diukur; yakni semua sistem control menggunakan sensor untuk mengukur variable fisis yang akan dijaga dekat dengan nilai yang diinginkan. Yang ketiga, tiap sistem mempunyai kalkulasi control, atau
algoritma, dimana menggunakan hasil pengukuran dan nilai yang diinginkan untuk menentukan koreksi pada proses operasi. Kalkulasi control untuk pemanas ruangan adalah contoh yang sangat sederhana (on/off), sedangkan control yang digunakan pada contoh “si pengemudi” akan sangat kompleks. Akhirnya, hasil kalkulasi akan diimplentasikan dengan mengeset salah satu alat pada sistem, dimana istilahnya adalah final control element, seperti setir mobil atau tombol saklar furnace dan pompa. Kunci fitur tersebut ditunjukkan secara skematik pada figure 1.4, dimana
dapat digunakan untuk merepresentasikan banyak sistem control.
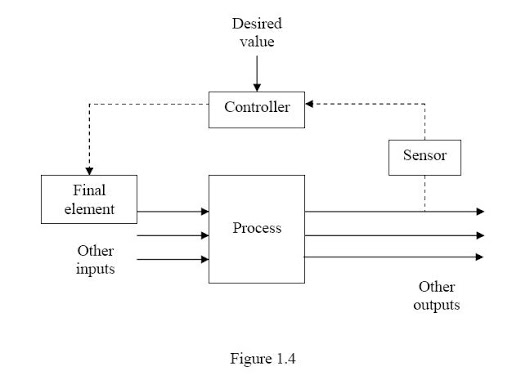
Setelah tadi kita membahas beberapa sistem control umum dan mengidentifikasikan kunci fitur, sekarang kita akan mendefinisikan istilah control. Kamus meberikan definisi untuk kata control sebagai “untuk mempengaruhi secara langsung”. Kita akan menggunakan definisi yang mirip dalam penerapan keperluan kita. Definisi berikut ini cocok untuk dua contoh fisis dan representasi skematik pada figure 1.4.
Control(verb): untuk mempertahankan kondisi yang diinginkan dalam sistem fisis dengan mengatur variable tertentu dalam sistem.
Contoh control mempunyai fitur tambahan yang amat penting. Itu adalah
feedback, yang didefinisikan sebagai berikut:
Feedback control menggunakan hasil keluaran output dari sistem untuk
mempengaruhi input dari sistem yang sama.
Sebagai contoh, temperatur ruangan yang digunakan, melewati keputusan
on/off thermostat, untuk mempengaruhi aliran air panas menuju heat exchanger. Sewaktu feedback digunakan untuk mengurangi perbedaan antara nilai aktual dan nilai yang diinginkan, ini dinamakan dengan “negative feedback”. Kecuali dinyatakan lain, maka kita selalu mendiskusikan negative feedback dan tidak akan menggunakan kata ‘negatif’. Dalam ilmu sosial dan vernacular umum, frasa “negative feedback” mengindikasikan perubahan yang tidak diinginkan, karena sebagian besar orang tidak menikmati menerima sinyal yang menyatakan mereka untuk mengoreksi kesalahan. Sebagian besar orang lebih suka menerima “positive feedback”, sinyal yang menyatakan mereka untuk melanjutkan kecenderungan untuk mencapai kondisi yang diinginkan. Perbedaan dalam terminologi ini sangat disayangkan; kita akan menggunakan terminologi pada kontrol otomatis, dimana “negatif” mengindikasikan perubahan yang bertujuan untuk mencapai nilai yang diinginkan diseluruh isi buku ini, tanpa kecuali.
Kegunaan penting dari feedback pada sistem kontrol dapat dilihat dengan
menganggap suatu alternatif tanpa feedback. Sebagai contoh, pendekatan alternatif dari pengaturan suhu ruangan yang diinginkan akan dilakukan dengan mengeset aliran air panas berdasarkan pengukuran temperatur luar ruangan dan model untuk kehilangan panas dari dalam ruangan. (tipe alternatif ini dinamakan feedforward, akan dibahas belakangan di buku ini, dimana penggunaannya bersamaan dengan feedback akan dibahas). Strategi tanpa feedback untuk mempertahankan suhu ruangan takkan
berhasil bila model tersebut mempunyai error—seperti yang biasanya terjadi. Beberapa penyebab dari error bisa disebabkan oleh kecepatan angin dan alian udara dari jendela yang terbuka. Di lain pihak, feedback dapat selalu memanipulasi final element untuk mencapai nilai yang diinginkan. Oleh karena itu, feedback menyediakan fitur yang kuat agar sistem kontrol dapat mencapai nilai terukur dekat dengan nilai yang diinginkan tanpa memerlukan model plant secara tepat.
Sebelum kita menyelesaikan bagian ini, istilah input dan output harus
diklarifikasikan. Sewaktu digunakan dalam pembahasan sistem kontrol, input dan output tidak ditujukan untuk material yang bergerak masuk dan keluar sistem. Disini istilah input ditujukan untuk variabel yang menyebabkan output. Dalam contoh ‘mengemudi’ input adalah posisi setir dan output adalah posisi mobil. Pada contoh pemanas ruangan, input adalah bahan bakar untuk furnace dan output adalah temperatur ruangan. Sangat penting untuk diketahui bahwa input menyebabkan output dan hubungan ini tidak dapat dibalik. Hubungan sebab-akibat yang timbul pada proses fisis memaksa kita untuk memilih input sebagai variabel manipulasi dan output sebagai variabel terukur. Banyak contoh dengan seleksi dari variabel kontrol dan variabel manipulasi akan ditampilkan dalam chapter berikut.
Oleh karena itu, jawaban untuk pertanyaan pertama mengenai fungsi kontrol adalah,” sistem kontrol feedback mempertahankan variabel spesifik dekat dengan nilai yang diinginkan dengan mengaplikasikan empat fitur dasar ditunjukkan dalam figur1.4.” Memahami dan mendesain sistem kontrol feedback merupakan tujuan utama dari buku ini.
1.3 Kenapa kontrol diperlukan?
Sebuah pertanyaan alami kedua terlibat kebutuhan akan kontrol. Ada dua
alasan utama untuk kontrol, dimana akan didiskusikan dengan respek untuk tangki berpengaduk yang sederhana dengan penukar panas yang digambarkan pada gambar1.5. Fluida proses mengalir ke dalam tangki dari sebuah pipa dan mengalir keluar dari tangki oleh aliran berlebih. Oleh karena itu, volume tangki konstan. Fluida pemanas mengalir dapat diatur dengan mengubah bukaan keran pada media aliran pemanas. Suhu dalam tangki dapat dikontrol.
Alasan pertama kontrol ialah untuk mempertahankan suhu pada nilai yang
diinginkan ketika gangguan muncul. Beberapa ganggguan khas untuk proses ini terjadi pada variabel berikut: laju alir dan suhu fluida proses masukan, suhu fluida pemanas dan tekanan aliran pemanas upstream dari keran. Sebagai latihan, anda sebaiknya menentukan bagaimana keran harus diatur (dibuka dan ditutup) pada respon utnuk meningkatkan pada tiap-tiap varibel gangguan tersebut.
Alasan kedua kontrol ialah untuk merespon perubahan pada nilai yang
diinginkan. Sebagai contoh, jika suhu yang diinginkan pada tangki berpengaduk dengan penukar panas ditingkatkan, persentase keran pemanas harus ditingkatkan. Nilai yang diinginkan berdasar pada analisis operasi pabrik dan sasaran. Analisis ini akan didiskusikan dalam bab 2, dimana topik utama diatur dalam tujuh kategori:
1. keselamatan
2. perlindungan lingkungan
3. perlindungan peralatan
4. operasi pabrik yang mulus dan laju produksi
5. kualitas produk
6. optimalisasi laba
7. pengawasan dan diagnosis
Topik ini ditranslasikan pada nilai variabel – suhu, tekanan, aliran, dan selanjutnya – dimana dapat dikontrol.
1.4 kenapa kontrol memungkinkan?
Desain yang tepat dari peralatan pabrik sangat penting untuk kontrol yang
memungkinkan dan untuk kontrol memberikan kinerja dinamik yang baik. Oleh karena itu, kontrol dan operasi dinamis merupakan faktor yang sangat penting pada desain pabrik. Berdasar pada fitur kunci dari kontrol umpan balik pada gambar1.4, desain pabrik harus termasuk sensor yang cukup dari variabel keluaran pabrik dan elemen kontrol final. Sensor harus merespon secara cepat sehingga aksi kontrol dapat diambil dalam waktu nyata. Sensor menggunakan variasi prinsip fisik yang ada untuk variabel proses dasar (aliran, suhu, tekanan, dan level), komposisi (seperti fraksi mol)
dan sifat fisik (densitas, viskositas, kalor pembakaran). Banyak sensor disertakan pada peralatan proses, dengan sebuah pelapis melindungi mereka dari efek korosi dari aliran. Yang lain membutuhkan sampel diambil secara periodik dari proses; sebagai catatan sampling ini dapat secara otomatis sehingga hasil sensor baru ada untuk interval frekuensi. Elemen kontrol final dari proses kimia biasanya berupa keran mempengaruhi aliran fluida, tetapi mereka dapat merupakan variabel manipulasi lainnya, seperti tenaga untuk motor elektrik atau kecepatan pada sabuk pemutar.
Pemikiran penting lainnya ialah kapasitas dari peralatan proses. Peralatan
harus mempunyai kapasitas yang cukup besar untuk merespon semua gangguan yang diharapkan dan perubahan pada nilai yang diinginkan. Untuk tangki berpengaduk dengan penukar panas, tugas maksimum, yang dipengaruhi oleh suhu, area dan laju alir media pemanas, harus cukup besar untuk mempertahankan suhu tangki untuk mengantisipasi semua gangguan. Tugas yang paling besar berhubungan dengan suhu keluaran maksimum, aliran fluida maksimum, suhu fluida masukan terendah, dan
kehilangan kalor maksimum ke lingkungan. Setiap proses harus dianalisa untuk meyakinkan kapasitas yang tepat. Diskusi lebih lanjut dari topik ini muncul pada dua bab selanjutnya.
Alhasil, sebagai jawaban kenapa kontrol memungkinkan ialah kita mengantisipasi perubahan yang diinginkan pada variabel pabrik dan menyediakan peralatan yang cukup ketika pabrik didesain. Desain peralatan yang tepat untuk kontrol harus dihitung berdasar perubahan yang diinginkan; yaitu dengan menambah kapasitas ekstra sekitar 20%, untuk ukuran peralatan yang tak tepat. Dalam beberapa kasus, ini akan menjadi sampah; di lain hal, kapasitas peralatan tidak akan tepat. Jika analisis ini tidak tepat atau perubahan di luar asumsi muncul, mencapai operasi pabrik
yang dapat diterima melalui manipulasi elemen kontrol final tidak memungkinkan.
1.5 bagaimana kontrol dilakukan?
Seperti yang kita lihat pada contoh mobil auto, feedback kontrol oleh aksi
manusia memungkinkan. Dalam beberapa hal, pendekatan ini layak, tapi untuk aksi perulangan kontinu melelahkan untuk orang. Sabagai tambahan, perhitungan beberapa kontrol cukup kompleks atau harus diimplementasikan terlalu cepat untuk dilakukan oleh orang. Oleh karena itu, kebanyakan feedback kontrol otomatis, dimana membutuhkan fungsi kunci dari sensing, kalkulasi, dan manipulasi dilakukan oleh peralatan dan tiap elemen berhubungan dengan elemen lain dalam sistem kontrol.
Sekarang, kebanyakan kontrol otomatis diimplementasikan menggunakan peralatan elektronik, dimana menggunakan tingkat arus listrik atau voltase untuk menggambarkan nilai untuk dikomunikasikan. Seperti yang diharapkan, banyak computing dan beberaap dari fungsi komunikasi ditampilkan secara meningkat biasanya denga teknologi digital. Dalam beberapa kasus, sistem kontrol menggunakan pneumatic, hidrolik, dan mekanisme mekanis untuk mengkalkulasi dan berkomunikasi; dalam sistem ini, sinyal digambarkan oleh tekanan atau posisi fisik.
Proses pabrik tipikal akan memiliki contoh untuk tiap instrumentasi dan komunikasi.
Sejak aspek penting dari proses kontrol ialah instrumentasi, buku ini
memperkenalkan beberapa sensor umum dan keran, tetapi pemilihan yang tepat dari peralatan ini untuk desain pabrik membutuhkan referensi untuk satu handbooks pada area ini sebagai tambahan.
Elemen kunci lainnya dari proses kendali ialah device (perangkat) melakukan perhitungan. Perhitungan kendali dilakukan oleh komputasi analog untuk sebagian besar sejarah dari process plant.
Peralatan komputasi analog diterapkan dengan membangun suatu system fisik. Pendekatan kalkulasi ini tidak fleksibel. Sebagai tambahan, kalkulasi yang kompleks tidak dapat dilakukan. Bagaimanapun juga beberapa control feed back masih diterapkan dengan alasan biaya dan reliabilitas yang sesuai dengan kondisi pabrik. Dengan kelebihan berupa computer digital yang berbiaya rendah, sebagian besar dari perhitungan control dan semua perhitungan kompleks dilakukan oleh computer digital. Sebagian besar dari prinsip-prinsip yang ada pada buku ini dapat diterapkan pada perangkat analog maupun digital.
Aspek-aspek tertentu dari control digital akan diperkenalkan pada Bab 11.
Pada semua Bab setelah Bab 11, prinsip-prinsip kendali dibahas beserta aspek-aspek tertentu dari baik penerapan analog maupun digital, maka kedua cara tersebut dalam melakukan kalkulasi akan dibahas pada suatu kesatuan.
Maka untuk pertanyaan “ Bagaimana kendali dilakukan?” jawabannya adalah sederhana yaitu “ secara otomatis menggunakan instrumentasi dan komputasi yang melakukan semua fitur dari control feedback tanpa adanya intervensi manusia.
1.6 Dimanakah kendali diimplementasikan ?
Secara fisik, pabrik-pabrik kimia besar dan kompleks. Orang-orang yang
bertanggung jawab untuk mengoperasikan pabrik dalam basis menit ke menit harus mempunyai informasi dari plant yang tersedia bagi mereka pada lokasi sentral.
Pengaturan yang paling umum dari peralatan control untuk mengakomodasi
kebutuhan ini ditunjukkan pada gambar (Figure) 1.6. Sewajarnya, sensor-sensor dan katup-katup terletak dalam proses. Sinyal-sinyal, yang biasanya elektronik, berkomunikasi dengan ruang kendali, dimana semua informasi ditampilkan untuk personil-personil operasional dan dimana kendali perhitungan dilakukan. Jarak antara proses dengan ruang kendali bervariasi dari beberapa ratus mil, bahkan lebih.
Pada suatu ruang kendali, suatu individu bertangggung jawab untuk
mengawasi dan mengoperasikan suatu bagian dari suatu pabrik yang kompleks dan besar, yang mengandung hingga 100 CV (controlled variables) dan 400 MV (measured variables) lainnya. Secara umum, plant tidak pernah beroperasi pada keadaan ‘automatic pilot’, selalu terdapat pekerja melakukan tugas-tugas ayng tidak seara otomatis, dengan tujuan mengoptimisasi operasi, dan untuk mengintervensi apabila suatu saat terjadi kejadian yang tidak biasa ataupun berbahaya, seperti kegagalan beroperasinya suatu peralatan. Pekerja lain yang ada pada peralatan proses,. Biasanya disebut sebagai pekerja yang berada di lapangan, untuk mengawasi peralatan dan untuk melakukan fungsi yang membutuhkan intervensi manual, sehingga pabrik kimia yang terautomisasi dengan baik, akan melibatkan interaksi antara perhitungan manusia dan perhitungan kontrol.
Konfigurasi kontrol lainnya adalah mungkin dan digunakan bila diperlukan.
Sebagai contoh, panel-panel kecil dengan instrumentasi yang dapat diletakkan didekat peralatan kritis dari suatu peralatan proses ketika operator membutuhkan suatu akses pada sistim kontrol selagi melakukan process adjustments pengaturan ini tidak akan mencegah sisa dari plant lainnya untuk dikontrol dari fasilitas sentral. Juga, banyak sensor-sensor yang menyediakan display visual dari suatu harga yang diukur, yang
dapat dilihat dari operator lokal sebagaimana suatu sinyal ditransmisikan pada ruang kendali pusat (sentral). Sehingga, operator lokal dapat menentukan kondisi operasi dari suatu unit, tetapi display lokal individual didistribusikan pada plant, tidak dikumpulkan pada satu tempat untuk operator lokal.
Jawaban singkat untuk pertanyaan lokasi adalah :
1. Sensor, indikator lokal, dan katup yang terdapat dalam proses
2. Display dari semua variabel plant dan kalkulasi kendali terdapat di fasilitas yang terpusat.
Peningkatan penggunaan dari komputasi digital tidak akan membuat distribusi dari kalkulasi kendali untuk lokasi sensor lebih praktis, tetapi untuk tujuan materi dari buku ini, semua kontroler akan dihubungkan pada suatu jaringan komputasi yang akan berfungsi seperti satu komputer.
1.7. Apakah insinyur teknik pengendalian (engineer of control engineering) itu?
Apa yang dapat dilakukan insinyur sehingga suatu plant dapat dipelihara reliabilitas dan keselamatannya hingga mendekati parameter yang diinginkan ? Sebagian besar keputusan dari insinyur tersebut akan dibahas pada lima topik berikut ini.
Desain proses
Kunci dalam teknik adalah desain dari sebuah proses sehingga proses dapat dikontrol degan baik. Misalnya pada pemanas ruangan terdapat temperatur maksimal dan minimal karena furnace dan heat exchanger tidak dapat merespon dengan cepat. Dengan begitu, sebuah plant yang lebih responsif akan dengan lebih mudah dikontrol. Responsif berarti variabel yang dikontrol dapat merespon dengan cepat untuk berapapun harga variabel yang dimanipulasi di-set. Dan juga, sebuah plant yang mudah beradaptasi dengan gangguan juga akan lebih mudah dikontrol.
Pengukuran
Kunci keputusan yang akan diambil adalah pemilihan jenis sensor dan
lokasinya, karena kita hanya dapat mengontrol nilai-nilai yang terukur.
Seorang insinyur harus memilih sensor yang dapat mengukur variabel-variabel penting dengan cepat dan dengan akurat.
Elemen akhir
Insinyur harus menyediakan alat, variabel yang dimanipulasi yang dapat
bersikap sesuai perhitungan kontrol. Contoh: contol valve sebagai elemen
akhir akan membuka atau menutup dengan persentasi bukaan/tutupan tertentu sesuai dengan signal yang dikirimkan ke valve dari kontroller.
Struktur kontrol
Insinyur harus dapat memutuskan beberapa hal paling dasar dalam
perancangan sistem kontrol. Misalnya, valve mana yang harus dimanipulasi
untuk mengontrol suatu pengukuran.
Perhitungan kontrol
Setelah struktur kontrol dan variabel sudah terpilih, persamaan-persamaan
tertentu harus dipilih untuk pengukuran nilai-nilai yang diinginkan untuk
menghitung variabel yang dimanipulasi. Seperti yang kita pelajari, hanya
beberapa persamaan yang sesuai untuk kontrol bagi berbagai macam plant.
1.8. Bagaimana kontrol proses didokumentasikan?
Ada banyak format untuk mendokumentasikan hasil. Yang paling umum
adalah spesifikasi dan ukuran alat, operasi manual, dan dokumentasi teknik dari eksperimen plant dan persamaan kontrol. Sebagai tambahan, insinyur kontrol memperluasnya dengan menggunakan gambar yang mempersentasikan berbagai perancangan tindakan. Penggambaran ini digunakan untuk berbagai tujuan, antara lain perancangan plant, pembelian alat dan evaluasi ulang prosedur keamanan dan operasi.
Untuk menghindari ketidaksepahaman maka dibuat standar simbol oleh “InstrumentSociety of America” yang digunakan di seluruh dunia. Contoh:
A Analyzer
F Laju alir
L Tinggi liquid dan solid dalam tangki
P Tekanan
T Suhu
Komunikasi ke sensor ditunjukkan sebagai garis utuh. Jika signal digunakan
hanya sebagai display bagi operator, mak ditambah simbol ‘I’ untuk indikator. Jika signal digunakan dalam perhitungan, maka ditunjukkan pula dalam sebuah lingkaran. Untuk kontroller, komunikasi ke elemen akhir ditunjukkan oleh garis putus-putus.
Simbol dasar dengan artinya terdapat di Appendix A. Versi simple dari
Standar Persatuan instrument Amerika cukup sudah cukup untuk buku ini dan akan menyediakan latar belakang yang cukup untuk penggambaran yang lebih rumit. Walaupun menggunakan standar merupakan kerja tambahan pada awalnya. Ini harus dipertimbangkan sebagai investasi kecil yang mengarah ke komunikasi yang benar, seperti belajar grammar dan vocabulary, digunakan oleh seluruh insinyur teknik kimia.
1.9. Sample apa yang mengontrol strategi?
Contoh sederhana system proses control diberikan pada gambar 1.7a sampai d. masing-masing gambar mencakup skema proses, sebuah kontroler (di aliran instrumentasi), serta hubungan antara variabel terukur dan manipulasi. Sebagai latihan pikiran, anda bisa menganalisa masing-masing system proses control untuk membuktikan hubungan sebab-akibat pada proses dan untuk mengetahui aksi dari kontroler yang akan diambil sebagai respon dari gangguan atau perubahan suatu nilai (set point).
Sebagai contoh, pada gambar 1.7a, dengan kenaikan temperature inlet,
system control akan melakukan peningkatan komposisi outlet dari reaktan.
Denganrespon, system control akan mengatur katup koil pemanas, menutupnya perlahan, sampai komposisi akhi sesuai dengan nilai yang diinginkan.
Contoh dari proses diagram yang lebih rumit, tanpa disain control, diberika
pada fig.1.8. Prosesnya mencakup reactor kimia, flash separator, heat exchanger dan aliran perpaan yang menghubungi. Catat bahwa sebuah insinyur disain control harus memilih pengukuran dan katup yang mungkin untuk mengetahui hubungan kontroler dari sekian banyak kemungkinan. Di chapter 25 anda akan mendisain system control untuk proses ini yang mengontrol variable kunci, seperti level reactor dan temperature separator, berdasarkan pada tujuan control
1.10. Kesimpulan
Materi chapter ini mengenai pengenalan kualitatif proses control. Anda telah belajarciri-ciri kunci dari feedback control begitu juga dengan tipe dari peralatan (instrument dan computer) yang dibutuhkan proses control ini. Pentingnya disain proses pada pengontrolan beberapa kali dibahas pada capter ini.
Berdasarkan pada pengenalan ini, kita dipersiapkan untuk membahas secara lebih hati-hati tujuan akhir dari proses control di chapter 2. Pengetahuan tentang tujuan akhir proses control penting untuk pemilihan tipe analisis yang digunakan di teknik control.
Disadur dari
http://www.chemeng.ui.ac.id/~wahid/kendali/Bab 1 Pengantar Pengendalian Proses.pdf
Terma kasih Pak Ir. Abdul Wahid, MT.
"Tjetjep"
1.1. PENDAHULUAN
Ketika kita melakukan pengamatan pada proses kimia di pabrik atau
laboratorium, maka terdapat banyak aliran dari vessel ke vessel, gelembung cairan dan material viscous serta semua alat berubah secara terus menerus. Dengan perubahan sedikit saja maka bisa terdapat respon yang berakibat fatal. Kesimpulan dari wacana sementara ini adalah bahwa dunia adalah sebuah dinamika dan ini merupakan alasan yang tepat untuk adanya sebuah proses kontrol. Dalam memahami perilaku sistem maka seorang engineer process design dapat memahami prilaku dinamiknya.
Teknik pengontrolan adalah ilmu teknik yang digunakan pada banyak aplikasi misalnya kimia, listrik dan teknik mesin serta diterapkan pada berbagai sistem fisik mulai dari sirkuit elektrik sampai pada perancangan robot. Dalam bidang ilmu teknik kimia proses kontrol diterapkan pada disain reaktor, Heat exchanger, dan peralatan transfer massa lainnya.
Proses kontrol adalah topik esensial bagi seorang chemical engineers misalnya pada perancangan pabrik yang harus mempertimbangkan prilaku dinamik pada semua peralatan karena pabrik tidak beroperasi secara steady state.
Engineers yang bertanggung jawab pada beroperasinya pabrik harus
memastika bahwa respon yang terjadi akibat adanya gangguan harus bsa diatasi agar tetap aman dan menguntungkan.
Kesimpulannya tugas seorang engineers untuk mendisain, membangun dan
mengoperasikan sistem fisik adalah sebuah aktivitas untuk menjaga sistem pada kondisi yang diinginkan.
Teknik proses kontrol meliputi analisis matematika dan praktek teknik,
sebelum kita memahami tujuan dari prinsip proses kontrol dan perhitungannya maka kita harus mengetahui tujuan dari proses kontrol dan hubungannya dengan teknik kimia. Bab ini akan membahas mengenai pertanyaan- pertanyaan sebagai berikut :
Ø Apa saja yang dilakukan proses kontrol?
Ø Mengapa diperlukan proses kontrol?
Ø Mengapa dimngkinkan adanya proses kontrol?
Ø Bagaimana proses kontrol dilakukan?
Ø Dimana sistem kontrol diterapkan?
Ø Apa saja yang dilakukan control engineer?
Ø Bagaimana proses kontrol didokumentasikan?
Ø Apa saja contoh dari sistem kontrol yang strategis?
1.2. Apa saja yang dilakukan oleh proses kontrol ?
Pertama tama kita akan mendiskusikan mengenai 2 contoh dari sistem kontrol yang terdapat dalam kehidupan kita sehari-hari kemudian kita akan mendiskusikan mengenai sistem yang lebih umum dalam defenisi sistem kontrol dan feedback kontrol.
Contoh pertama adalah orang yang mengendarai mobil seperti yang ditunjukan oleh Gambar 1.1. Supir harus memiliki tujuan atau objektif. Pertama tama supir harus menentukan lokasi dari mobil di jalan dengan menggunkan mata untuk melihat posisi mobil di jalan kemudian supir juga harus memperhitungkan keaadan agar menjaga mobil tetap pada posisi yang diinginkan di jalan dan akhirnya supir haruslah mengubah posisi mobil dengan menggunakan stir. Dengan mengunakan ketiga cara ini maka supir bisa menjaga mobil tetap berada pada posisi ynang diinginkan.
Contoh kedua adalah sistem pemanas sederhana seperti yang ditunjukan
gambar 1.2. Rumah yang berada pada daerah beriklim dingin bisa menaikan suhu dengan menggunakan pemanas. Temperatur dalam ruangan diukur oleh termostat yang kemudian membandingkannya dengan temperatur ruang pada range yang diinginkan, katakanlah 18 sampai 22oC. Jika temperature dibawah 18oC, furnace dan pompa akan menyala, dan jika temperature di atas 22oC, furnace dan pompa akan berhenti bekerja. Jika temperature diantara 18 sampai 22oC,kondisi furnace dan pompa tidak akan berubah. Secara umum prilaku dari kondisi temperature dalam rumah diberikan dalam figure 1.3, yang menunjukkan bagaimana temperature
bergeser secara perlahan dari batas atas dan bawah. Dapat dilihat juga bahwa ada suatu saat prilaku temperature melewati batas-batas tersebut, karena furnace dan heat exchanger tidak memberikan respons secepatnya. Pendekatan ini dinamakan “on/off”control dan dapat digunakan sewaktu control yang akurat pada nilai yang diinginkan tidak diperlukan. Kita akan membahas metode pengontrolan yang lebih baik di bagian berikutnya, dimana dapat mempertahankan variable yang penting cukup dekat pada nilai yang diinginkan.
Setelah tadi kita membahas secara sekilas mengenai dua sistem control,
kemudian kita akan mengidentifikasikan beberapa fitur umum. Yang pertama adalah tiap sistem menggunakan nilai yang spesifik (atau range) sebagai nilai yang diinginkan sebagai variable yang dikontrol. Sewaktu kita membahas kalkulasi control dalam Bagian III, kita akan menggunakan istilah set point untuk nilai yang diinginkan. Yang kedua, Kondisi dari sistem diukur; yakni semua sistem control menggunakan sensor untuk mengukur variable fisis yang akan dijaga dekat dengan nilai yang diinginkan. Yang ketiga, tiap sistem mempunyai kalkulasi control, atau
algoritma, dimana menggunakan hasil pengukuran dan nilai yang diinginkan untuk menentukan koreksi pada proses operasi. Kalkulasi control untuk pemanas ruangan adalah contoh yang sangat sederhana (on/off), sedangkan control yang digunakan pada contoh “si pengemudi” akan sangat kompleks. Akhirnya, hasil kalkulasi akan diimplentasikan dengan mengeset salah satu alat pada sistem, dimana istilahnya adalah final control element, seperti setir mobil atau tombol saklar furnace dan pompa. Kunci fitur tersebut ditunjukkan secara skematik pada figure 1.4, dimana
dapat digunakan untuk merepresentasikan banyak sistem control.
Setelah tadi kita membahas beberapa sistem control umum dan mengidentifikasikan kunci fitur, sekarang kita akan mendefinisikan istilah control. Kamus meberikan definisi untuk kata control sebagai “untuk mempengaruhi secara langsung”. Kita akan menggunakan definisi yang mirip dalam penerapan keperluan kita. Definisi berikut ini cocok untuk dua contoh fisis dan representasi skematik pada figure 1.4.
Control(verb): untuk mempertahankan kondisi yang diinginkan dalam sistem fisis dengan mengatur variable tertentu dalam sistem.
Contoh control mempunyai fitur tambahan yang amat penting. Itu adalah
feedback, yang didefinisikan sebagai berikut:
Feedback control menggunakan hasil keluaran output dari sistem untuk
mempengaruhi input dari sistem yang sama.
Sebagai contoh, temperatur ruangan yang digunakan, melewati keputusan
on/off thermostat, untuk mempengaruhi aliran air panas menuju heat exchanger. Sewaktu feedback digunakan untuk mengurangi perbedaan antara nilai aktual dan nilai yang diinginkan, ini dinamakan dengan “negative feedback”. Kecuali dinyatakan lain, maka kita selalu mendiskusikan negative feedback dan tidak akan menggunakan kata ‘negatif’. Dalam ilmu sosial dan vernacular umum, frasa “negative feedback” mengindikasikan perubahan yang tidak diinginkan, karena sebagian besar orang tidak menikmati menerima sinyal yang menyatakan mereka untuk mengoreksi kesalahan. Sebagian besar orang lebih suka menerima “positive feedback”, sinyal yang menyatakan mereka untuk melanjutkan kecenderungan untuk mencapai kondisi yang diinginkan. Perbedaan dalam terminologi ini sangat disayangkan; kita akan menggunakan terminologi pada kontrol otomatis, dimana “negatif” mengindikasikan perubahan yang bertujuan untuk mencapai nilai yang diinginkan diseluruh isi buku ini, tanpa kecuali.
Kegunaan penting dari feedback pada sistem kontrol dapat dilihat dengan
menganggap suatu alternatif tanpa feedback. Sebagai contoh, pendekatan alternatif dari pengaturan suhu ruangan yang diinginkan akan dilakukan dengan mengeset aliran air panas berdasarkan pengukuran temperatur luar ruangan dan model untuk kehilangan panas dari dalam ruangan. (tipe alternatif ini dinamakan feedforward, akan dibahas belakangan di buku ini, dimana penggunaannya bersamaan dengan feedback akan dibahas). Strategi tanpa feedback untuk mempertahankan suhu ruangan takkan
berhasil bila model tersebut mempunyai error—seperti yang biasanya terjadi. Beberapa penyebab dari error bisa disebabkan oleh kecepatan angin dan alian udara dari jendela yang terbuka. Di lain pihak, feedback dapat selalu memanipulasi final element untuk mencapai nilai yang diinginkan. Oleh karena itu, feedback menyediakan fitur yang kuat agar sistem kontrol dapat mencapai nilai terukur dekat dengan nilai yang diinginkan tanpa memerlukan model plant secara tepat.
Sebelum kita menyelesaikan bagian ini, istilah input dan output harus
diklarifikasikan. Sewaktu digunakan dalam pembahasan sistem kontrol, input dan output tidak ditujukan untuk material yang bergerak masuk dan keluar sistem. Disini istilah input ditujukan untuk variabel yang menyebabkan output. Dalam contoh ‘mengemudi’ input adalah posisi setir dan output adalah posisi mobil. Pada contoh pemanas ruangan, input adalah bahan bakar untuk furnace dan output adalah temperatur ruangan. Sangat penting untuk diketahui bahwa input menyebabkan output dan hubungan ini tidak dapat dibalik. Hubungan sebab-akibat yang timbul pada proses fisis memaksa kita untuk memilih input sebagai variabel manipulasi dan output sebagai variabel terukur. Banyak contoh dengan seleksi dari variabel kontrol dan variabel manipulasi akan ditampilkan dalam chapter berikut.
Oleh karena itu, jawaban untuk pertanyaan pertama mengenai fungsi kontrol adalah,” sistem kontrol feedback mempertahankan variabel spesifik dekat dengan nilai yang diinginkan dengan mengaplikasikan empat fitur dasar ditunjukkan dalam figur1.4.” Memahami dan mendesain sistem kontrol feedback merupakan tujuan utama dari buku ini.
1.3 Kenapa kontrol diperlukan?
Sebuah pertanyaan alami kedua terlibat kebutuhan akan kontrol. Ada dua
alasan utama untuk kontrol, dimana akan didiskusikan dengan respek untuk tangki berpengaduk yang sederhana dengan penukar panas yang digambarkan pada gambar1.5. Fluida proses mengalir ke dalam tangki dari sebuah pipa dan mengalir keluar dari tangki oleh aliran berlebih. Oleh karena itu, volume tangki konstan. Fluida pemanas mengalir dapat diatur dengan mengubah bukaan keran pada media aliran pemanas. Suhu dalam tangki dapat dikontrol.
Alasan pertama kontrol ialah untuk mempertahankan suhu pada nilai yang
diinginkan ketika gangguan muncul. Beberapa ganggguan khas untuk proses ini terjadi pada variabel berikut: laju alir dan suhu fluida proses masukan, suhu fluida pemanas dan tekanan aliran pemanas upstream dari keran. Sebagai latihan, anda sebaiknya menentukan bagaimana keran harus diatur (dibuka dan ditutup) pada respon utnuk meningkatkan pada tiap-tiap varibel gangguan tersebut.
Alasan kedua kontrol ialah untuk merespon perubahan pada nilai yang
diinginkan. Sebagai contoh, jika suhu yang diinginkan pada tangki berpengaduk dengan penukar panas ditingkatkan, persentase keran pemanas harus ditingkatkan. Nilai yang diinginkan berdasar pada analisis operasi pabrik dan sasaran. Analisis ini akan didiskusikan dalam bab 2, dimana topik utama diatur dalam tujuh kategori:
1. keselamatan
2. perlindungan lingkungan
3. perlindungan peralatan
4. operasi pabrik yang mulus dan laju produksi
5. kualitas produk
6. optimalisasi laba
7. pengawasan dan diagnosis
Topik ini ditranslasikan pada nilai variabel – suhu, tekanan, aliran, dan selanjutnya – dimana dapat dikontrol.
1.4 kenapa kontrol memungkinkan?
Desain yang tepat dari peralatan pabrik sangat penting untuk kontrol yang
memungkinkan dan untuk kontrol memberikan kinerja dinamik yang baik. Oleh karena itu, kontrol dan operasi dinamis merupakan faktor yang sangat penting pada desain pabrik. Berdasar pada fitur kunci dari kontrol umpan balik pada gambar1.4, desain pabrik harus termasuk sensor yang cukup dari variabel keluaran pabrik dan elemen kontrol final. Sensor harus merespon secara cepat sehingga aksi kontrol dapat diambil dalam waktu nyata. Sensor menggunakan variasi prinsip fisik yang ada untuk variabel proses dasar (aliran, suhu, tekanan, dan level), komposisi (seperti fraksi mol)
dan sifat fisik (densitas, viskositas, kalor pembakaran). Banyak sensor disertakan pada peralatan proses, dengan sebuah pelapis melindungi mereka dari efek korosi dari aliran. Yang lain membutuhkan sampel diambil secara periodik dari proses; sebagai catatan sampling ini dapat secara otomatis sehingga hasil sensor baru ada untuk interval frekuensi. Elemen kontrol final dari proses kimia biasanya berupa keran mempengaruhi aliran fluida, tetapi mereka dapat merupakan variabel manipulasi lainnya, seperti tenaga untuk motor elektrik atau kecepatan pada sabuk pemutar.
Pemikiran penting lainnya ialah kapasitas dari peralatan proses. Peralatan
harus mempunyai kapasitas yang cukup besar untuk merespon semua gangguan yang diharapkan dan perubahan pada nilai yang diinginkan. Untuk tangki berpengaduk dengan penukar panas, tugas maksimum, yang dipengaruhi oleh suhu, area dan laju alir media pemanas, harus cukup besar untuk mempertahankan suhu tangki untuk mengantisipasi semua gangguan. Tugas yang paling besar berhubungan dengan suhu keluaran maksimum, aliran fluida maksimum, suhu fluida masukan terendah, dan
kehilangan kalor maksimum ke lingkungan. Setiap proses harus dianalisa untuk meyakinkan kapasitas yang tepat. Diskusi lebih lanjut dari topik ini muncul pada dua bab selanjutnya.
Alhasil, sebagai jawaban kenapa kontrol memungkinkan ialah kita mengantisipasi perubahan yang diinginkan pada variabel pabrik dan menyediakan peralatan yang cukup ketika pabrik didesain. Desain peralatan yang tepat untuk kontrol harus dihitung berdasar perubahan yang diinginkan; yaitu dengan menambah kapasitas ekstra sekitar 20%, untuk ukuran peralatan yang tak tepat. Dalam beberapa kasus, ini akan menjadi sampah; di lain hal, kapasitas peralatan tidak akan tepat. Jika analisis ini tidak tepat atau perubahan di luar asumsi muncul, mencapai operasi pabrik
yang dapat diterima melalui manipulasi elemen kontrol final tidak memungkinkan.
1.5 bagaimana kontrol dilakukan?
Seperti yang kita lihat pada contoh mobil auto, feedback kontrol oleh aksi
manusia memungkinkan. Dalam beberapa hal, pendekatan ini layak, tapi untuk aksi perulangan kontinu melelahkan untuk orang. Sabagai tambahan, perhitungan beberapa kontrol cukup kompleks atau harus diimplementasikan terlalu cepat untuk dilakukan oleh orang. Oleh karena itu, kebanyakan feedback kontrol otomatis, dimana membutuhkan fungsi kunci dari sensing, kalkulasi, dan manipulasi dilakukan oleh peralatan dan tiap elemen berhubungan dengan elemen lain dalam sistem kontrol.
Sekarang, kebanyakan kontrol otomatis diimplementasikan menggunakan peralatan elektronik, dimana menggunakan tingkat arus listrik atau voltase untuk menggambarkan nilai untuk dikomunikasikan. Seperti yang diharapkan, banyak computing dan beberaap dari fungsi komunikasi ditampilkan secara meningkat biasanya denga teknologi digital. Dalam beberapa kasus, sistem kontrol menggunakan pneumatic, hidrolik, dan mekanisme mekanis untuk mengkalkulasi dan berkomunikasi; dalam sistem ini, sinyal digambarkan oleh tekanan atau posisi fisik.
Proses pabrik tipikal akan memiliki contoh untuk tiap instrumentasi dan komunikasi.
Sejak aspek penting dari proses kontrol ialah instrumentasi, buku ini
memperkenalkan beberapa sensor umum dan keran, tetapi pemilihan yang tepat dari peralatan ini untuk desain pabrik membutuhkan referensi untuk satu handbooks pada area ini sebagai tambahan.
Elemen kunci lainnya dari proses kendali ialah device (perangkat) melakukan perhitungan. Perhitungan kendali dilakukan oleh komputasi analog untuk sebagian besar sejarah dari process plant.
Peralatan komputasi analog diterapkan dengan membangun suatu system fisik. Pendekatan kalkulasi ini tidak fleksibel. Sebagai tambahan, kalkulasi yang kompleks tidak dapat dilakukan. Bagaimanapun juga beberapa control feed back masih diterapkan dengan alasan biaya dan reliabilitas yang sesuai dengan kondisi pabrik. Dengan kelebihan berupa computer digital yang berbiaya rendah, sebagian besar dari perhitungan control dan semua perhitungan kompleks dilakukan oleh computer digital. Sebagian besar dari prinsip-prinsip yang ada pada buku ini dapat diterapkan pada perangkat analog maupun digital.
Aspek-aspek tertentu dari control digital akan diperkenalkan pada Bab 11.
Pada semua Bab setelah Bab 11, prinsip-prinsip kendali dibahas beserta aspek-aspek tertentu dari baik penerapan analog maupun digital, maka kedua cara tersebut dalam melakukan kalkulasi akan dibahas pada suatu kesatuan.
Maka untuk pertanyaan “ Bagaimana kendali dilakukan?” jawabannya adalah sederhana yaitu “ secara otomatis menggunakan instrumentasi dan komputasi yang melakukan semua fitur dari control feedback tanpa adanya intervensi manusia.
1.6 Dimanakah kendali diimplementasikan ?
Secara fisik, pabrik-pabrik kimia besar dan kompleks. Orang-orang yang
bertanggung jawab untuk mengoperasikan pabrik dalam basis menit ke menit harus mempunyai informasi dari plant yang tersedia bagi mereka pada lokasi sentral.
Pengaturan yang paling umum dari peralatan control untuk mengakomodasi
kebutuhan ini ditunjukkan pada gambar (Figure) 1.6. Sewajarnya, sensor-sensor dan katup-katup terletak dalam proses. Sinyal-sinyal, yang biasanya elektronik, berkomunikasi dengan ruang kendali, dimana semua informasi ditampilkan untuk personil-personil operasional dan dimana kendali perhitungan dilakukan. Jarak antara proses dengan ruang kendali bervariasi dari beberapa ratus mil, bahkan lebih.
Pada suatu ruang kendali, suatu individu bertangggung jawab untuk
mengawasi dan mengoperasikan suatu bagian dari suatu pabrik yang kompleks dan besar, yang mengandung hingga 100 CV (controlled variables) dan 400 MV (measured variables) lainnya. Secara umum, plant tidak pernah beroperasi pada keadaan ‘automatic pilot’, selalu terdapat pekerja melakukan tugas-tugas ayng tidak seara otomatis, dengan tujuan mengoptimisasi operasi, dan untuk mengintervensi apabila suatu saat terjadi kejadian yang tidak biasa ataupun berbahaya, seperti kegagalan beroperasinya suatu peralatan. Pekerja lain yang ada pada peralatan proses,. Biasanya disebut sebagai pekerja yang berada di lapangan, untuk mengawasi peralatan dan untuk melakukan fungsi yang membutuhkan intervensi manual, sehingga pabrik kimia yang terautomisasi dengan baik, akan melibatkan interaksi antara perhitungan manusia dan perhitungan kontrol.
Konfigurasi kontrol lainnya adalah mungkin dan digunakan bila diperlukan.
Sebagai contoh, panel-panel kecil dengan instrumentasi yang dapat diletakkan didekat peralatan kritis dari suatu peralatan proses ketika operator membutuhkan suatu akses pada sistim kontrol selagi melakukan process adjustments pengaturan ini tidak akan mencegah sisa dari plant lainnya untuk dikontrol dari fasilitas sentral. Juga, banyak sensor-sensor yang menyediakan display visual dari suatu harga yang diukur, yang
dapat dilihat dari operator lokal sebagaimana suatu sinyal ditransmisikan pada ruang kendali pusat (sentral). Sehingga, operator lokal dapat menentukan kondisi operasi dari suatu unit, tetapi display lokal individual didistribusikan pada plant, tidak dikumpulkan pada satu tempat untuk operator lokal.
Jawaban singkat untuk pertanyaan lokasi adalah :
1. Sensor, indikator lokal, dan katup yang terdapat dalam proses
2. Display dari semua variabel plant dan kalkulasi kendali terdapat di fasilitas yang terpusat.
Peningkatan penggunaan dari komputasi digital tidak akan membuat distribusi dari kalkulasi kendali untuk lokasi sensor lebih praktis, tetapi untuk tujuan materi dari buku ini, semua kontroler akan dihubungkan pada suatu jaringan komputasi yang akan berfungsi seperti satu komputer.
1.7. Apakah insinyur teknik pengendalian (engineer of control engineering) itu?
Apa yang dapat dilakukan insinyur sehingga suatu plant dapat dipelihara reliabilitas dan keselamatannya hingga mendekati parameter yang diinginkan ? Sebagian besar keputusan dari insinyur tersebut akan dibahas pada lima topik berikut ini.
Desain proses
Kunci dalam teknik adalah desain dari sebuah proses sehingga proses dapat dikontrol degan baik. Misalnya pada pemanas ruangan terdapat temperatur maksimal dan minimal karena furnace dan heat exchanger tidak dapat merespon dengan cepat. Dengan begitu, sebuah plant yang lebih responsif akan dengan lebih mudah dikontrol. Responsif berarti variabel yang dikontrol dapat merespon dengan cepat untuk berapapun harga variabel yang dimanipulasi di-set. Dan juga, sebuah plant yang mudah beradaptasi dengan gangguan juga akan lebih mudah dikontrol.
Pengukuran
Kunci keputusan yang akan diambil adalah pemilihan jenis sensor dan
lokasinya, karena kita hanya dapat mengontrol nilai-nilai yang terukur.
Seorang insinyur harus memilih sensor yang dapat mengukur variabel-variabel penting dengan cepat dan dengan akurat.
Elemen akhir
Insinyur harus menyediakan alat, variabel yang dimanipulasi yang dapat
bersikap sesuai perhitungan kontrol. Contoh: contol valve sebagai elemen
akhir akan membuka atau menutup dengan persentasi bukaan/tutupan tertentu sesuai dengan signal yang dikirimkan ke valve dari kontroller.
Struktur kontrol
Insinyur harus dapat memutuskan beberapa hal paling dasar dalam
perancangan sistem kontrol. Misalnya, valve mana yang harus dimanipulasi
untuk mengontrol suatu pengukuran.
Perhitungan kontrol
Setelah struktur kontrol dan variabel sudah terpilih, persamaan-persamaan
tertentu harus dipilih untuk pengukuran nilai-nilai yang diinginkan untuk
menghitung variabel yang dimanipulasi. Seperti yang kita pelajari, hanya
beberapa persamaan yang sesuai untuk kontrol bagi berbagai macam plant.
1.8. Bagaimana kontrol proses didokumentasikan?
Ada banyak format untuk mendokumentasikan hasil. Yang paling umum
adalah spesifikasi dan ukuran alat, operasi manual, dan dokumentasi teknik dari eksperimen plant dan persamaan kontrol. Sebagai tambahan, insinyur kontrol memperluasnya dengan menggunakan gambar yang mempersentasikan berbagai perancangan tindakan. Penggambaran ini digunakan untuk berbagai tujuan, antara lain perancangan plant, pembelian alat dan evaluasi ulang prosedur keamanan dan operasi.
Untuk menghindari ketidaksepahaman maka dibuat standar simbol oleh “InstrumentSociety of America” yang digunakan di seluruh dunia. Contoh:
A Analyzer
F Laju alir
L Tinggi liquid dan solid dalam tangki
P Tekanan
T Suhu
Komunikasi ke sensor ditunjukkan sebagai garis utuh. Jika signal digunakan
hanya sebagai display bagi operator, mak ditambah simbol ‘I’ untuk indikator. Jika signal digunakan dalam perhitungan, maka ditunjukkan pula dalam sebuah lingkaran. Untuk kontroller, komunikasi ke elemen akhir ditunjukkan oleh garis putus-putus.
Simbol dasar dengan artinya terdapat di Appendix A. Versi simple dari
Standar Persatuan instrument Amerika cukup sudah cukup untuk buku ini dan akan menyediakan latar belakang yang cukup untuk penggambaran yang lebih rumit. Walaupun menggunakan standar merupakan kerja tambahan pada awalnya. Ini harus dipertimbangkan sebagai investasi kecil yang mengarah ke komunikasi yang benar, seperti belajar grammar dan vocabulary, digunakan oleh seluruh insinyur teknik kimia.
1.9. Sample apa yang mengontrol strategi?
Contoh sederhana system proses control diberikan pada gambar 1.7a sampai d. masing-masing gambar mencakup skema proses, sebuah kontroler (di aliran instrumentasi), serta hubungan antara variabel terukur dan manipulasi. Sebagai latihan pikiran, anda bisa menganalisa masing-masing system proses control untuk membuktikan hubungan sebab-akibat pada proses dan untuk mengetahui aksi dari kontroler yang akan diambil sebagai respon dari gangguan atau perubahan suatu nilai (set point).
Sebagai contoh, pada gambar 1.7a, dengan kenaikan temperature inlet,
system control akan melakukan peningkatan komposisi outlet dari reaktan.
Denganrespon, system control akan mengatur katup koil pemanas, menutupnya perlahan, sampai komposisi akhi sesuai dengan nilai yang diinginkan.
Contoh dari proses diagram yang lebih rumit, tanpa disain control, diberika
pada fig.1.8. Prosesnya mencakup reactor kimia, flash separator, heat exchanger dan aliran perpaan yang menghubungi. Catat bahwa sebuah insinyur disain control harus memilih pengukuran dan katup yang mungkin untuk mengetahui hubungan kontroler dari sekian banyak kemungkinan. Di chapter 25 anda akan mendisain system control untuk proses ini yang mengontrol variable kunci, seperti level reactor dan temperature separator, berdasarkan pada tujuan control
1.10. Kesimpulan
Materi chapter ini mengenai pengenalan kualitatif proses control. Anda telah belajarciri-ciri kunci dari feedback control begitu juga dengan tipe dari peralatan (instrument dan computer) yang dibutuhkan proses control ini. Pentingnya disain proses pada pengontrolan beberapa kali dibahas pada capter ini.
Berdasarkan pada pengenalan ini, kita dipersiapkan untuk membahas secara lebih hati-hati tujuan akhir dari proses control di chapter 2. Pengetahuan tentang tujuan akhir proses control penting untuk pemilihan tipe analisis yang digunakan di teknik control.
Disadur dari
http://www.chemeng.ui.ac.id/~wahid/kendali/Bab 1 Pengantar Pengendalian Proses.pdf
Terma kasih Pak Ir. Abdul Wahid, MT.
"Tjetjep"







Tidak ada komentar:
Posting Komentar